我们的肌肉是自然界的完美致动器——将能量转化为运动的装置。就其尺寸而言,肌肉纤维比大多数合成致动器更强大、更精确。他们甚至可以从损伤中恢复过来,并通过运动变得更强壮。
出于这些原因,工程师们正在探索用天然肌肉为机器人提供动力的方法。他们已经展示了一些“生物混合”机器人,这些机器人使用基于肌肉的致动器为行走、游泳、泵送和抓握的人造骨骼提供动力。但是对于每个机器人来说,都有一个非常不同的构建,并且没有关于如何充分利用任何给定机器人设计的肌肉的通用蓝图。
现在,麻省理工学院的工程师们已经开发出一种类似弹簧的设备,可以用作几乎所有肌肉束缚机器人的基本骨架模块。新的弹簧,或“弯曲”,旨在从任何附着的肌肉组织中获得最大的锻炼。就像腿部推举一样,重量恰到好处,该设备可以最大限度地提高肌肉自然产生的运动量。
研究人员发现,当他们将一圈肌肉组织安装到设备上时,就像橡皮筋在两根柱子上拉伸一样,肌肉可靠而反复地拉动弹簧,并将其拉伸五倍,与其他以前的设备设计相比。
该团队将挠曲设计视为一种新的构建块,可以与其他挠曲结合来构建任何配置的人造骨架。然后,工程师可以用肌肉组织安装骨骼,为他们的运动提供动力。
“这些弯曲就像一个骨架,人们现在可以用它来以一种非常可预测的方式将肌肉驱动转化为多个运动自由度,”麻省理工学院工程设计英国和Alex d’Arbeloff职业发展教授Ritu Raman说。“我们正在为机器人专家提供一套新的规则,以制造强大而精确的肌肉动力机器人,这些机器人可以做有趣的事情。
Raman和她的同事在今天发表在 《高级智能系统 》杂志上的一篇论文中报告了新挠曲设计的细节。该研究的麻省理工学院合著者包括 Naomi Lynch ’12、SM ’23;本科生塔拉·希恩(Tara Sheehan);研究生尼古拉斯·卡斯特罗、劳拉·罗萨多和布兰登·里奥斯;和机械工程教授马丁·卡尔佩珀(Martin Culpepper)。
肌肉拉扯
当在有利的条件下单独放置在培养皿中时,肌肉组织会自行收缩,但方向不能完全预测或没有多大用处。
“如果肌肉没有附着在任何东西上,它会移动很多,但变化很大,它只是在液体中四处乱窜,”拉曼说。
为了让肌肉像机械致动器一样工作,工程师通常会在两个小而灵活的柱子之间连接一条肌肉组织带。当肌肉带自然收缩时,它可以弯曲柱子并将它们拉在一起,产生一些运动,理想情况下可以为机器人骨骼的一部分提供动力。但在这些设计中,肌肉产生的运动有限,主要是因为组织在接触柱子的方式上变化很大。根据肌肉在柱子上的位置,以及肌肉表面接触柱子的程度,肌肉可能会成功地将柱子拉在一起,但在其他时候可能会以无法控制的方式摆动。
拉曼的团队希望设计一种骨架,无论肌肉在骨架上的确切位置和方式如何,都能集中并最大化肌肉的收缩,以可预测、可靠的方式产生最大的运动。
“问题是:我们如何设计一个最有效地利用肌肉产生的力的骨骼?”拉曼说。
研究人员首先考虑了肌肉可以自然运动的多个方向。他们推断,如果肌肉要沿特定方向将两根柱子拉在一起,则柱子应该连接到弹簧上,该弹簧只允许它们在拉动时向该方向移动。
“我们需要一种在一个方向上非常柔软和灵活,在所有其他方向上都非常坚硬的装置,这样当肌肉收缩时,所有的力都会有效地转化为一个方向的运动,”拉曼说。
软柔韧性
事实证明,拉曼在Martin Culpepper教授的实验室中发现了许多这样的设备。Culpepper 在麻省理工学院的团队专门从事机器元件的设计和制造,例如微型执行器、轴承和其他机构,这些元件可以内置到机器和系统中,以实现超精确的运动、测量和控制,适用于各种应用。该小组的精密加工元件包括挠曲——一种类似弹簧的装置,通常由平行梁制成,可以以纳米级精度弯曲和拉伸。
“根据梁的薄度和相距的远,你可以改变弹簧的刚度,”拉曼说。
她和 Culpepper 联手设计了一种专门针对配置和刚度量身定制的弯曲,使肌肉组织能够自然收缩并最大限度地拉伸弹簧。该团队根据他们进行的大量计算设计了该设备的配置和尺寸,以将肌肉的自然力与弯曲的刚度和运动程度联系起来。
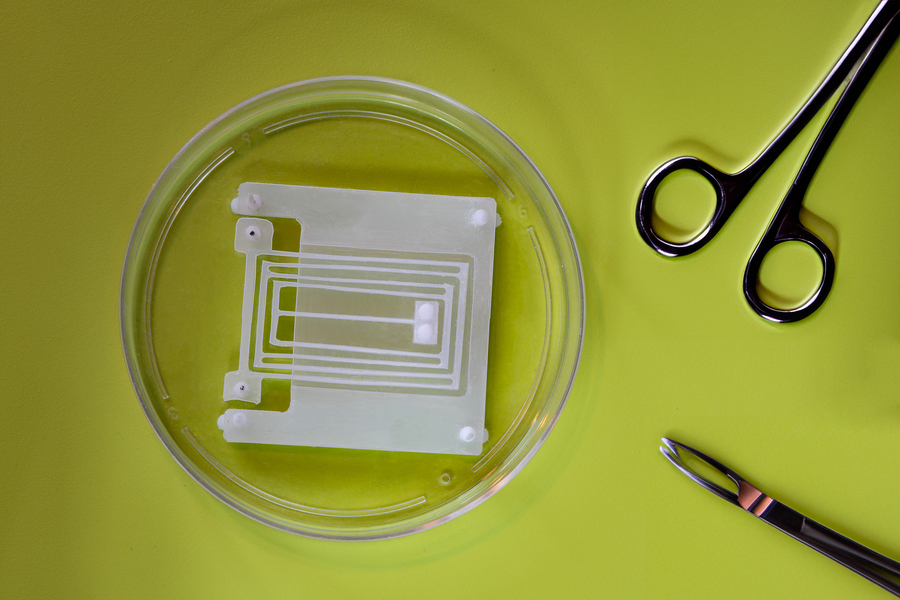
他们最终设计的弯曲度是肌肉组织本身硬度的 1/100。该装置类似于一个微型的手风琴状结构,其角通过一个小柱子固定在下面的底座上,该柱子位于直接安装在底座上的相邻柱子附近。然后,拉曼将一条肌肉带缠绕在两个角柱上(研究小组用它们从小鼠细胞中生长出来的活肌肉纤维塑造了这些带子),并测量了当肌肉带收缩时柱子被拉在一起的距离。
研究小组发现,弯曲的配置使肌肉带能够主要沿着两个柱子之间的方向收缩。与以前的肌肉致动器设计相比,这种集中收缩使肌肉能够将柱子拉得更近——更近五倍。
“弯曲是一个骨架,我们设计在一个方向上非常柔软和灵活,在所有其他方向上都非常坚硬,”拉曼说。“当肌肉收缩时,所有的力量都会转化为该方向的运动。这是一个巨大的放大倍数。
该团队发现他们可以使用该设备来精确测量肌肉性能和耐力。当他们改变肌肉收缩的频率时(例如,刺激条带收缩一次而不是每秒收缩四次),他们观察到肌肉在更高的频率下“变得疲倦”,并且没有产生那么多的拉力。
“看看我们的肌肉疲劳的速度有多快,以及我们如何锻炼它们以获得高耐力反应——这就是我们可以通过这个平台发现的,”拉曼说。
研究人员现在正在调整和组合弯曲,以构建由天然肌肉驱动的精确、铰接和可靠的机器人。
“我们未来试图建造的机器人的一个例子是可以在体内执行微创手术的手术机器人,”拉曼说。“从技术上讲,肌肉可以为任何尺寸的机器人提供动力,但我们对制造小型机器人感到特别兴奋,因为这是生物执行器在强度、效率和适应性方面表现出色的地方。”
新闻旨在传播有益信息,英文版原文来自https://news.mit.edu/2024/mit-engineers-design-flexible-skeletons-muscle-powered-robots-0408