厘米级的步行和爬行机器人因其探索狭窄或杂乱环境的能力以及低制造成本而受到需求。现在,由工程与应用科学学院机械工程与应用力学(MEAM)系的Gabel Family Term助理教授Cynthia Sung领导的研究人员从折纸启发的建筑中汲取灵感,精心设计了一种更简化的方法来设计和制造这些机器人。 这种厘米级的四足动物被称为 CurveQuad,利用弯曲的折纸进行自我折叠、展开、爬行和转向,所有这些都使用单个电机。与更常用的直线折痕设计相比,这种技术中的弯曲折痕具有有趣的机械性能,因为它们会导致折叠板材弯曲。能量储存在折痕的折叠和面板的弯曲中,允许使用更少的执行器进行可控的、可逆的和复杂的运动。 “机器人之所以能够做这些事情,是因为它使用了弯曲的折痕,”Sung说,他也是宾夕法尼亚大学通用机器人、自动化、传感和感知(GRASP)实验室的成员,“由于它很简单,因此相对便宜,我们想象将来可以进行类似的设计,以快速部署机器人群,每个机器人可以以美元甚至美分的价格生产。 研究结果发表在《IEEE/RSJ智能机器人与系统国际会议论文集》上。研究人员于 10 月 2 日在密歇根州底特律举行的 2023 年 IEEE/RSJ 智能机器人与系统国际会议 (IROS 2023) 上展示了他们的工作。 CurveQuad 用于自动折叠和移动的单电机减少了机器人的总质量和体积。受折纸启发的设计还简化了厘米级机器人的制造和组装,方法是用几块平板材料制造整个机器人或其零件,然后将其折叠成 3D 形状,通常带有完全嵌入的电子设备、执行器和板载计算。这些制造工艺还可以扩展到大批量生产。 在《今日宾夕法尼亚工程》上阅读更多内容。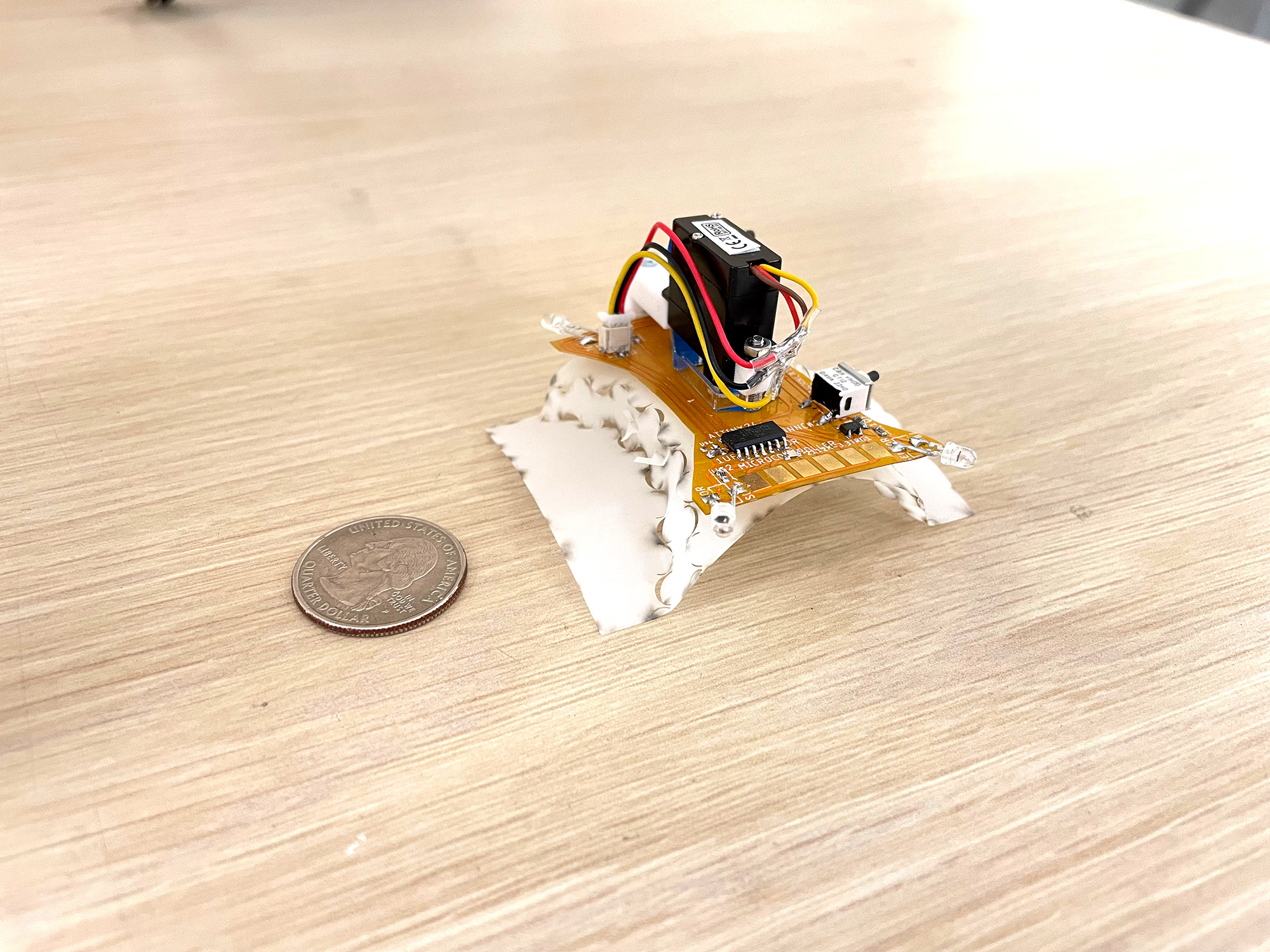
新闻旨在传播有益信息,英文版原文来自 https://penntoday.upenn.edu/news/centimeter-scale-quadruped-leverages-curved-crease-origami