在《科学机器人》(Science Robotics)杂志上发表的一篇论文中,来自加州大学洛杉矶分校萨缪埃尔工程学院(UCLA Samueli School of Engineering)的材料科学家描述了一种游泳机器人的新设计。
这种设备被称为OsciBot,因为它通过摆动尾巴来移动,最终可能会设计出远洋机器人和自主船只。它的设计灵感来自一种叫做趋光性的自然现象朝向或远离光源的运动在整个动物界都有。例如,水母和蛾子都被光所吸引。
OsciBot证明,通过振动运动可以直接为恒定的光提供动力,而不是依赖于收集并储存在电池中的光能。它完全由一种叫做水凝胶的软材料制成,当放在水中时,水凝胶会膨胀,并且对光有反应。该设备不需要电池,也不需要连接到其他电源。,
researchers’第一个目标是确定他们是否能创造一种新的方法来使用恒定的能量源使物体以振荡模式运动。
为此,他们建造了一个2厘米长的柔性圆柱体,并将其固定在水箱底部。当他们把一束光对准圆柱体时,他们发现光使它每分钟弯曲66次通过移动光源的位置,他们可以使设备左右弯曲,上下弯曲。
研究人员还确定,设备振动的速度可以根据圆柱体的长度和厚度以及使用了多少光来调整。
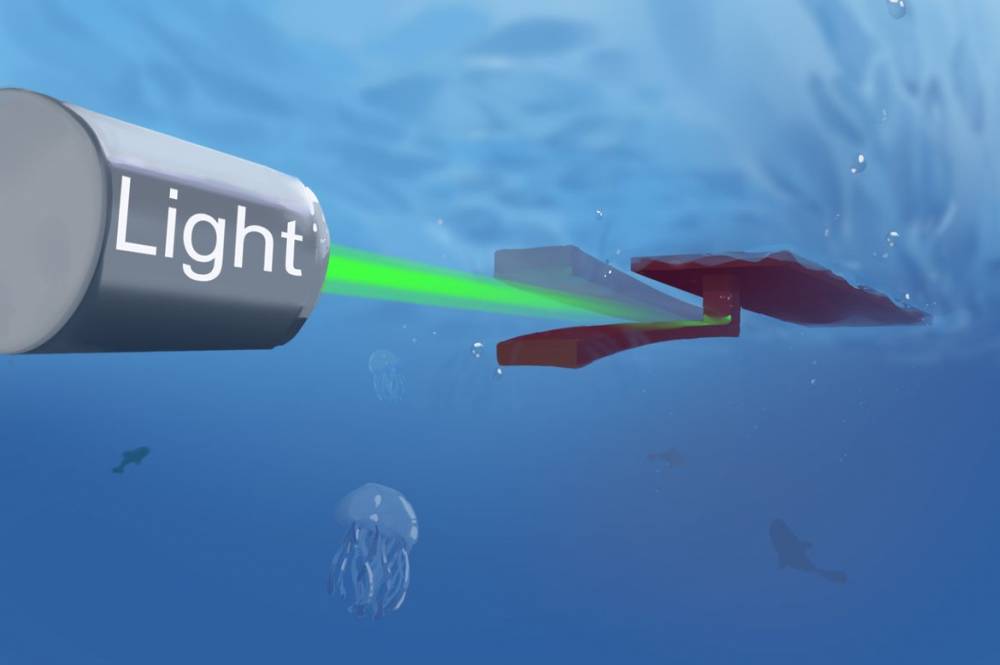
在了解了如何创建振荡运动后,该团队用同样的水凝胶制作了一个形状像矩形冲浪板的机器人,它有一个延伸的水下尾巴。
当激光照射到尾巴上的一个点时,这个点就会变热。温度的轻微升高会导致机器人的这个部位喷出一些水,体积缩小,从而使尾巴向光源移动。当它向上移动后,尾巴会产生一个阴影,使激光最初与机器人接触的部分冷却下来,从而导致尾巴再次下降。
只要光线照射到目标点,这个过程就会重复,产生拍打的动作。研究人员观察到,这条尾巴每分钟拍打35次,其速度足以使机器人每分钟移动1.15倍于其体长的距离或者大约是由间歇性光驱动的同类机器人速度的两倍。
“通常,产生振荡依赖于间歇性的能量输入,如脉冲光或交流电,”加州大学洛杉矶分校材料科学与工程助理教授、该研究的首席研究员何希敏说。“相比之下,这项研究显示了一种产生振荡的新方法,它使用了一种恒定的能量输入,这种输入很容易从周围环境获得,而且成本低廉。”
研究人员还发现,通过重新定位光线,他们可以让机器人绕过轻微的弯曲,这表明光线也可以用来操控设备。
“这真的是一个基本的证明,直接和恒定的光可以驱动和决定运动,”该研究的主要作者,加州大学洛杉矶分校材料科学与工程博士生赵玉森说。“这可能是朝着各种机器人设计迈出的一步,这些机器人不受束缚,只依靠周围环境中可用的光线提供动力,而不是依靠沉重的电池或电力电缆。”
如果建造规模更大,类似的设计最终可能用于大型水下螺旋桨或利用阳光操纵的风帆;在微观尺寸上,这种方法可以用于开发执行精确外科手术的机器人。(在这种情况下,光可以来自一个单独的医疗仪器。)工程师们还可以调整设计的速度和可操作性。
“基于凝胶的光振荡器的美妙之处在于它的设计简单,”他说。“‘聪明人’之间的相互作用柔软的材料和环境光线使它能够自我调节运动。”
他说,这种设计可以适应使用其他形式的能源例如声波、电子或磁信号。
他也是加州大学洛杉矶分校加州纳米系统研究所的成员。加州大学洛杉矶分校的其他作者是前博士后学者陈璇和钱晓石;研究生优素福和穆天华;以及机械与航天工程助理教授金丽华。
这项研究得到了海军研究办公室、美国空军科学研究办公室和赫尔曼研究员基金的支持。赵和他已经申请了光振荡技术的专利。
新闻旨在传播有益信息,英文原版地址:http://newsroom.ucla.edu/releases/soft-bodied-swimming-robot-constant-light