从着火的建筑物、化学品泄漏或任何人类救援人员无法到达的灾难中营救受害者,可能有一天会成为适应性强的机器人的任务。例如,想象一下,救援机器人可以四肢着地穿过瓦砾,然后用两条腿站立起来,推开沉重的障碍物,或者打破一扇锁着的门。
工程师们在四足机器人的设计以及它们的跑、跳、甚至后空翻能力方面取得了长足的进步。但让两条腿的类人机器人在不摔倒的情况下对物体施力或推动,一直是一个重大的障碍。
现在,麻省理工学院和伊利诺伊大学厄巴纳-香槟分校的工程师们已经开发出了一种控制两腿遥控机器人平衡的方法。
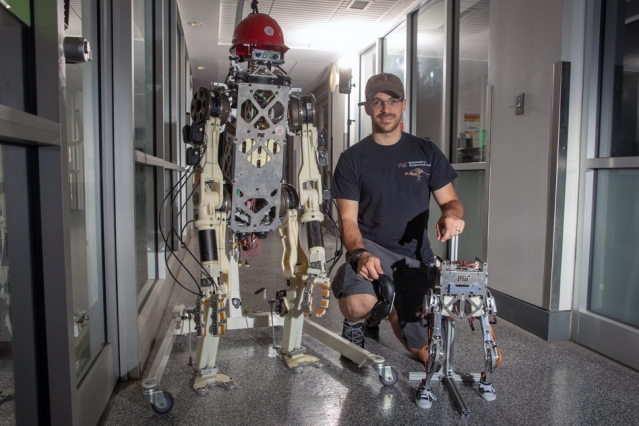
该团队的机器人在外形上类似于加工过的躯干和两条腿,由身穿背心的操作员远程控制,将有关人体运动和地面反作用力的信息传递给机器人。
通过背心,操作者既可以控制机器人的运动,又可以感知机器人的动作。如果机器人开始翻倒,人就会感觉到背心上相应的拉力,就会做出调整,同时调整自己和机器人的平衡。
为了测试这种新的“平衡反馈”方法,研究人员对机器人进行了实验,当它与人类操作员同步跳跃和行走时,研究人员能够远程维持机器人的平衡。
“这就像背着沉重的背包跑步——你可以感觉到背包在你周围的运动,你可以适当地补偿,”Joao Ramos说,他是麻省理工学院的博士后,开发了这种方法。“现在,如果你想打开一扇沉重的门,人类可以命令机器人用身体撞门,然后推门,而不会失去平衡。”
拉莫斯现在是伊利诺伊大学厄巴纳-香槟分校的助理教授。这项研究的合著者是麻省理工学院机械工程副教授金相培(Sangbae Kim)。
多运动
此前,Kim和Ramos建造了两腿机器人HERMES(用于高效的机器人机械和机电系统),并开发了通过远程操作模仿操作员动作的方法,研究人员称这种方法具有一定的人文优势。
“因为你有一个人可以在飞行中学习和适应,机器人可以执行以前从未执行过的动作(通过远程操作),”拉莫斯说。
在演示中,赫尔墨斯把咖啡倒进杯子里,用斧头砍柴,用灭火器灭火。
所有这些任务都涉及到机器人的上半身,以及使机器人的肢体定位与操作者的肢体定位相匹配的算法。赫尔墨斯能够进行高强度的运动,是因为机器人扎根在原地。在这些情况下,保持平衡要简单得多。然而,如果要求机器人采取任何步骤,它可能会在试图模仿操作员的动作时翻倒。
“我们意识到,为了产生强大的力量或移动重物,仅仅复制动作是不够的,因为机器人很容易摔倒,”Kim说。“我们需要复制操作员的动态平衡。”
小赫尔墨斯(Little HERMES)是一个微型版的赫尔墨斯(HERMES),大约是一般成年人的三分之一大小。该团队将机器人设计成简单的躯干和两条腿,并专门设计了该系统来测试下半身的任务,如运动和平衡。和它的全身版一样,小爱马仕是为远程操作而设计的,它有一个穿着背心的操作员来控制机器人的动作。
为了让机器人模仿操作员的平衡,而不仅仅是他们的动作,研究小组必须首先找到一种表示平衡的简单方法。拉莫斯最终意识到,平衡可以归结为两种主要成分:一个人的质心和他们的压力中心——基本上就是地面上的一个点,在那里施加的力相当于所有支持力。
拉莫斯发现,质量中心的位置与压力中心的关系,直接关系到一个人在任何时候的平衡程度。他还发现,这两种成分的位置可以用倒立摆的物理形式来表示。想象一下,你一边摇摆着身体,一边一动不动地站在原地。这种效果类似于一个倒立的钟摆的摇摆,上端代表一个人的质心(通常在躯干上),下端代表他们在地面上的压力中心。
举重
定义如何质心与压力中心,拉莫斯收集人体运动数据,包括测量在实验室里,在那里他来回摇摆,走,跳上一个力板,测量了部队他施加在地上,脚和躯干的位置被记录下来。然后他把这些数据压缩成质心和压力中心的测量值,并建立了一个模型来表示它们之间的关系,就像一个倒立摆。
然后,他开发了第二个模型,类似于人类平衡模型,但缩放到更小、更轻的机器人的尺寸,他开发了一个控制算法,以连接和支持两个模型之间的反馈。
研究人员首先在实验室里搭建的一个简单的倒立摆上测试了这个平衡反馈模型。他们将光束连接到远程操作系统上,根据操作员的动作,光束沿着轨道来回摆动。当操作员向一边摇摆时,光束也随之摆动——操作员也能通过背心感受到这种运动。如果横梁摇晃得太厉害,操作员会感觉到拉力,就会用另一种方式来补偿,从而保持横梁的平衡。
实验表明,新的反馈模型可以在梁上保持平衡,因此研究人员随后在小赫尔墨斯上尝试了该模型。他们还开发了一种算法,让机器人自动将简单的平衡模型转换为每只脚必须产生的力,从而复制操作员的脚。
在实验室里,拉莫斯发现,当他穿着背心时,他不仅可以控制机器人的动作和平衡,还可以感觉到机器人的动作。当机器人被来自不同方向的锤子击打时,拉莫斯感到背心在机器人移动的方向上发生了抖动。拉莫斯本能地抵制了这种牵引力,机器人将其视为质心相对于压力中心的一种微妙的移动,而它反过来又模仿了这种移动。结果是,即使在不断的击打中,机器人也能避免翻倒。
小赫尔墨斯还在其他运动中模仿拉莫斯,包括原地跑动和跳跃,在不平整的地面上行走,所有这些都在没有绳索或支撑的情况下保持平衡。
“平衡反馈很难定义,因为它是我们不需要思考就能做到的事情,”Kim说。这是第一次平衡反馈被正确定义为动态动作。这将改变我们控制遥控类人机器人的方式。”
金姆和拉莫斯将继续致力于开发一种具有类似平衡控制的全身类人机器人,以便有一天能够在灾区驰骋,并在救援或打捞任务中起来推开障碍物。
Kim说:“现在我们可以通过适当的平衡交流来打开沉重的门,举起或投掷沉重的物体。”
这项研究得到了鸿海精密工业股份有限公司(Hon Hai Precision Industry Co. Ltd.)和Naver Labs Corporation的部分支持。
新闻旨在传播有益信息,英文原版地址:http://news.mit.edu/2019/two-legged-robot-mimics-human-balance-while-running-jumping-1030