机器人蜂朝墙壁倾斜或撞到玻璃盒子的情景可能曾在哈佛大学约翰·a·保尔森工程与应用科学学院(SEAS)的哈佛微型机器人实验室的研究人员中引发过恐慌,但仅此而已。
海洋研究所和威斯生物工程研究所的研究人员已经开发出一种有弹性的机器人蜜蜂,它由柔软的人造肌肉提供动力,可以撞到墙上,掉到地板上,并与其他机器人蜜蜂相撞而不受伤害。这是第一款由软致动器驱动的微型机器人,实现了受控飞行。
这篇论文的第一作者、前美国海洋研究所研究生、博士后陈玉峰(音)说:“在微机器人领域,人们一直在大力推动用软驱动器制造移动机器人,因为它们具有很强的弹性。”“然而,该领域的许多人一直怀疑它们能否用于飞行机器人,因为这些驱动器的功率密度不够高,而且众所周知,它们很难控制。”我们的致动器具有足够高的功率密度和可控性,以实现悬停飞行。
 软执行器具有足够高的功率密度和可控性,可以实现悬停飞行。
软执行器具有足够高的功率密度和可控性,可以实现悬停飞行。这项研究发表在《自然》杂志上。
为了解决功率密度的问题,研究人员在材料学的扩展Tarr家族教授David Clarke实验室开发的电动软致动器的基础上进行了研究。这些软致动器是用绝缘弹性体制成的,这种软材料具有良好的绝缘性能,在施加电场时会变形。
通过提高电极导电性,研究人员能够以500赫兹的频率操作执行器,与之前在类似机器人中使用的刚性执行器不相上下。
处理软执行器时的另一个挑战是,系统往往会弯曲并变得不稳定。为了解决这一挑战,研究人员建造了一个轻型的机身,机身上有一段垂直约束的螺纹,以防止执行器弯曲。
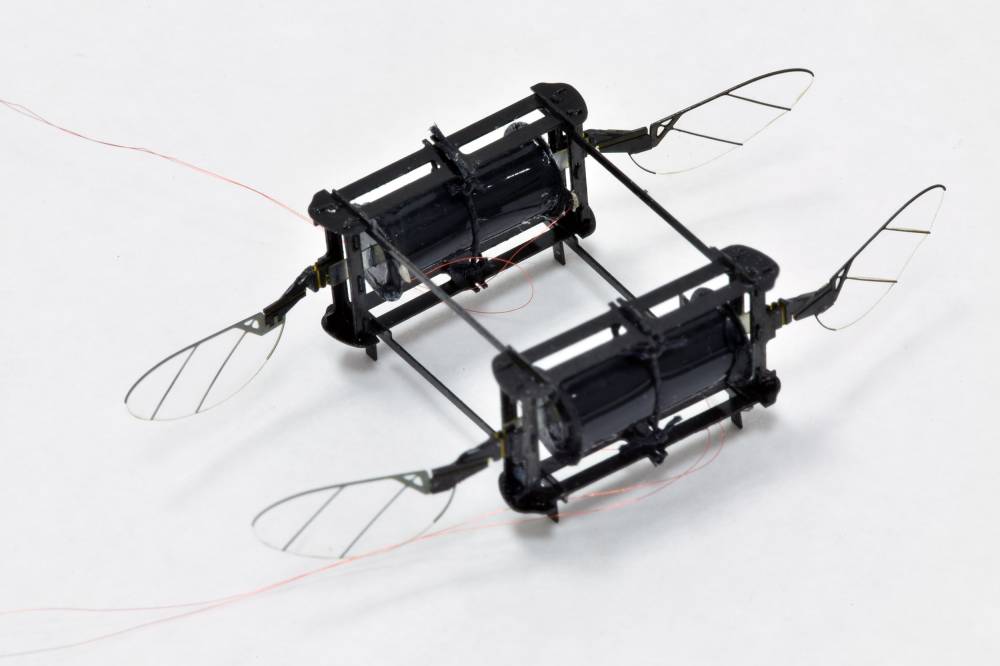
在这些小型机器人中,软致动器可以很容易地组装和更换。为了展示各种飞行能力,研究人员建造了几种不同的软动力机器人蜂模型。双翼模型可以从地面起飞,但没有额外的控制。一个四翼双致动器模型可以在一个混乱的环境中飞行,在一次飞行中克服多次碰撞。
“小型、低质量机器人的一个优势是它们对外部冲击的弹性,”曾在美国海洋研究所(SEAS)读研究生的论文合著者伊丽莎白·法雷尔·赫尔布林(Elizabeth Farrell Helbling)说。软致动器提供了一个额外的好处,因为它可以更好地吸收冲击比传统的驱动策略。这将在潜在的应用中派上用场,比如在废墟中飞行执行搜救任务。”
一个八翼四致动器模型演示了控制悬停飞行,这是第一个软动力飞行微型机器人。
接下来,研究人员的目标是提高这种软动力机器人的效率,它仍然远远落后于更传统的飞行机器人。
“具有肌肉样特性和电激活的软致动器是机器人领域的一大挑战,”查尔斯河海洋工程与应用科学教授、威斯生物工程研究所核心成员、论文资深作者罗伯特·伍德(Robert Wood)说。“如果我们能制造出高性能的人造肌肉,那么我们所能制造的机器人的极限就是天空。”
哈佛大学的技术发展办公室已经保护了与这个项目相关的知识产权,并正在探索商业化的机会。
这篇论文是由赵慧涵,毛杰,Pakpong Chirarattananon, nako -seung Patrick Hyun, and Clarke合著的。
这项研究得到了美国国家科学基金会的部分资助。
相关的

机器人蜂独自飞行

所有人的软机器人

软触摸
新闻旨在传播有益信息,英文原版地址:https://news.harvard.edu/gazette/story/2019/11/first-flight-of-robobee-powered-by-soft-muscles/