如果你手边有一支钢笔或铅笔,试试这个动作:用拇指和食指抓住笔的一端,把另一端推到桌子上。手指滑下钢笔,然后把它倒过来,不要让它掉下来。不太难,对吧?
但是对于一个机器人来说——比如说,一个正在整理一箱物体并试图抓住其中一个的机器人——这是一个在计算上很费力的操作。甚至在尝试移动之前,它必须计算一长串的属性和概率,比如桌子、笔和它的两个手指的摩擦和几何形状,以及这些属性的各种组合如何根据物理基本定律在机械上相互作用。
现在,麻省理工学院的工程师们找到了一种方法,可以显著加快机器人的规划过程,通过将一个物体推到一个固定的表面来调整它对一个物体的抓取。传统的算法需要几十分钟来规划出一系列动作,而新团队的方法将这个预先规划过程缩短到不到一秒。
麻省理工学院机械工程副教授阿尔贝托•罗德里格斯(Alberto Rodriguez)表示,更快的规划过程将使机器人——尤其是在工业环境中——能够迅速找出如何推动、滑动,或以其他方式利用环境中的特征来重新定位手中的物体。这种灵活的操作对于任何涉及挑选和排序的任务,甚至是复杂的工具使用都很有用。
罗德里格斯说:“这是一种提高哪怕是简单的机器人手爪灵活性的方法,因为在一天结束的时候,环境是每个机器人都拥有的。”
该小组的研究结果今天发表在《国际机器人研究杂志》上。罗德里格斯的合著者包括机械工程研究生Nikhil Chavan-Dafle和电子工程与计算机科学研究生Rachel Holladay。
圆锥物理学
罗德里格斯的团队致力于使机器人能够利用它们的环境来帮助它们完成物理任务,比如挑选和分类垃圾箱里的物品。
现有的算法通常需要数小时预案机械爪的运动序列,主要是因为,每一个动作,它认为,必须首先计算算法,运动是否会满足一些物理定律,比如牛顿运动定律和库仑定律描述对象之间的摩擦力。
“整合所有这些定律,考虑机器人可能做的所有运动,并从中选择一个有用的,是一个冗长乏味的计算过程,”罗德里格斯说。
他和他的同事们找到了一种简洁的方法来解决这些操作的物理问题,然后决定机器人的手应该如何移动。他们使用了“运动锥”,这是一种视觉上的锥形摩擦地图。
圆锥体的内部描述了所有可以施加到特定位置的物体上的推动运动,同时满足基本的物理定律,使机器人能够保持对物体的控制。圆锥体外的空间代表了所有的推力,这些推力在某种程度上会导致一个物体从机器人的抓握中滑出。
Holladay解释说:“看起来很简单的变化,比如机器人抓取物体的力度,就可以极大地改变物体在被推送时的抓取方式。”“根据你抓的力度,会有不同的动作。这是算法处理的物理推理的一部分。”
该团队的算法计算了机器人夹持器、所持物体和所推环境之间的不同可能配置的运动锥,以便选择和排序不同的可行推以重新定位物体。

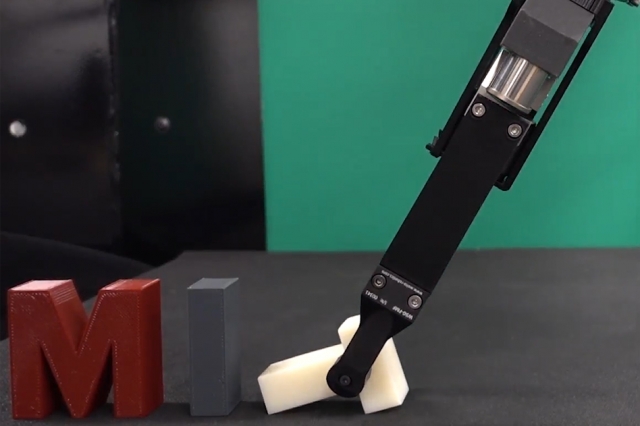
一种新的算法加快了机器人抓取器的规划过程。实验室里的一个机器人拿起一个大写字母T,然后把它推到附近的墙上重新调整角度,然后再把它放回原来的位置。
Holladay说:“这是一个复杂的过程,但仍然比传统的方法要快得多——快到策划整个推的过程只需要半秒钟。”
大计划
研究人员在一个三向交互的物理装置上测试了这个新算法,在这个装置中,一个简单的机器人手握一个t型块,并推着一个垂直的杆。他们使用了多种启动配置,机器人以特定的位置抓住积木,并从一定的角度推动它。对于每个初始配置,算法会立即生成机器人可以施加的所有可能的力的地图,以及将产生的块的位置。
Holladay说:“我们做了几千次实验来验证我们的模型能够正确预测现实世界中会发生什么。”“如果我们在锥体内部施加推力,被抓住的物体应该保持在控制之下。如果是在外面,物体就会从抓握中滑落。”
研究人员发现,该算法的预测可靠匹配的物理结果在实验室里,计划序列的运动,如调整块对酒吧之前设置了一个表在一个直立的位置——在不到一秒钟的时间,与传统的算法相比计划接管500秒。
罗德里格斯说:“因为我们有这种机器人、物体和它们的环境之间的三向相互作用的力学的紧凑表示,我们现在可以解决更大的规划问题。”
该小组希望应用并扩展其方法,使机器人夹具能够处理不同类型的工具,例如在制造环境中。
“大多数使用工具的工厂机器人都有一只专门设计的手,所以他们没有手拿螺丝刀并以多种不同方式使用它的能力,只是把这只手变成了螺丝刀,”Holladay说。“你可以想象,这需要更少的灵活规划,但它是更多的限制。我们希望机器人能够使用并捡起许多不同的东西。”
这项研究部分得到了Mathworks、MIT-HKUST联盟和国家科学基金会的支持。
新闻旨在传播有益信息,英文原版地址:http://news.mit.edu/2019/robotic-faster-grip-adjust-1017