今天的商用飞机通常是分段制造的,通常是在不同的地方——一个工厂的机翼,另一个工厂的机身部分,另一个地方的尾部部件——然后用大型货机飞到中央工厂进行最后的组装。
但是,如果最后的组装是唯一的组装,整个飞机是由一大批微小相同的部件组成的,所有这些部件都是由一群微型机器人组装起来的,那会怎么样呢?
这就是麻省理工学院(MIT)位与原子中心(CBA)的研究生本杰明·杰奈特(Benjamin Jenett)与尼尔·格申菲尔德教授(Neil Gershenfeld)合作的博士论文所追求的愿景。现在,这类机器人的原型版本已经可以组装小型结构,甚至可以作为一个团队一起工作来组装更大的组件。
新研究发表在10月份发布的IEEE机器人与自动化字母,在一篇Jenett, Gershenfeld,各位研究生阿米拉任,和CBA校友肯尼斯·张SM的07年,博士的12,他现在是在美国宇航局艾姆斯研究中心,在那里他领导的舰队项目设计一个月球基地,可以由机器人组装。
“这篇论文是一种享受,”休斯敦大学(University of Houston)电子与计算机工程副教授亚伦·贝克尔(Aaron Becker)说。他说:“它结合了顶尖的机械设计、令人瞠目结舌的演示、新的机器人硬件和一个包含超过10万个元素的模拟套件。”
“这一技术的核心是一种新型机器人,我们称之为相对机器人,”Gershenfeld说。他解释说,从历史上看,机器人有两大类:一类是由昂贵的定制组件制成,经过精心优化以适应特定应用,如工厂组装;另一类是由廉价的批量生产模块制成,但性能要低得多。然而,新的机器人是两者的替代品。它们比前一种简单得多,但比后一种能力强得多,而且它们有可能彻底改变大规模系统的生产,从飞机到桥梁再到整个建筑。
根据Gershenfeld的说法,关键的区别在于机器人设备和它所处理和操纵的材料之间的关系。他说,有了这些新型机器人,“你不能把机器人从结构中分离出来——它们作为一个系统一起工作。”例如,虽然大多数移动机器人需要高度精确的导航系统来跟踪它们的位置,但新的装配机器人只需要跟踪它们相对于它们当前工作的称为体素的小亚基的位置。每当机器人迈出一步进入下一个体素时,它都会重新调整自己的位置感,总是与它当前所站的特定组件相关。
底层的愿景是,正如最复杂的图像可以被使用的数组复制像素在屏幕上,几乎任何物理对象可以重新创建为一个小三维数组,或压,这本身就可以简单的struts和节点组成。该团队已经证明,这些简单的组件可以有效地分配负载;它们主要由开放空间构成,因此结构的整体重量被最小化。这些单元可以被简单的汇编器拾取并放置到相邻的位置,然后使用嵌入到每个体素中的锁存系统将它们固定在一起。
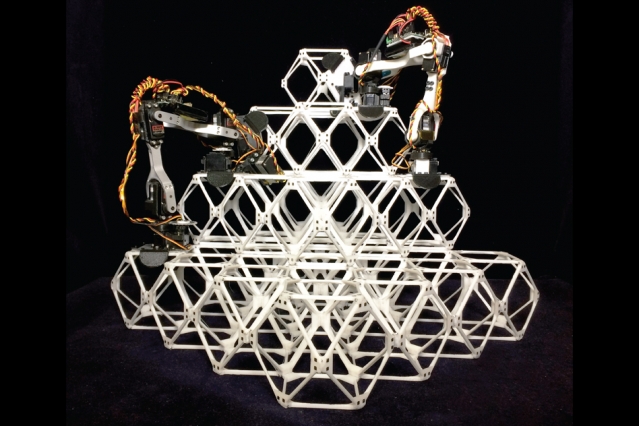
机器人本身类似于一个小手臂,有两个长段在中间铰接,以及夹住两端体素结构的装置。这些简单的装置像尺蠖一样移动,通过反复打开和关闭它们v形的身体从一个移动到另一个,沿着一排体素前进。杰奈特将这种小机器人命名为BILL-E(向电影《机器人瓦力》致敬),意思是两足各向同性晶格移动探测器。


计算机仿真显示了一组由四个装配机器人组成的三维结构。整群这样的机器人可以被释放出来,创造大型结构,如飞机机翼或太空栖息地。插图由研究人员提供
Jenett已经构建了几个版本的汇编器作为概念验证设计,以及相应的voxel设计,这些设计具有锁存机制,可以方便地将每个汇编器与其相邻的汇编器连接或分离。他使用这些原型来演示如何将积木组装成线性、二维和三维的结构。“我们没有在机器人中加入精度;精度来自于结构,“当它逐渐成形时,”杰耐特说。“这和其他所有机器人都不一样。它只需要知道下一步在哪里。”
CBA的主管格申菲尔德说,在组装部件的过程中,每个小机器人都能在结构上计算步数。他说,除了导航,这还能让机器人纠正每一步的错误,从而消除了典型机器人系统的大部分复杂性。“它没有大多数常规的控制系统,但只要它不漏掉一个步骤,它就知道自己在哪里。”“对于实际的装配应用,成群的这样的部件可以一起工作来加速过程,这要感谢Abdel-Rahman开发的控制软件,它可以让机器人协调他们的工作,避免互相妨碍。”
这种组装的大型结构从相同的子单元使用一个简单的机器人系统,就像一个孩子组装一个大城堡的乐高积木,已经吸引了一些主要潜在用户的利益,包括NASA,麻省理工学院对这一研究的合作者,和欧洲航空公司空客,也帮助赞助这项研究。
这种组装的一个优点是,维修和维护可以很容易地处理与初始组装相同的机器人过程。损坏的部分可以从结构上拆卸下来,用新的部分代替,从而产生和原来一样坚固的结构。“取消构建和构建一样重要,”Gershenfeld说,而且随着时间的推移,这个过程也可以用来修改或改进系统。
“对于空间站或月球栖息地,这些机器人将生活在结构上,不断地维护和修理它,”杰奈特说。
最终,这样的系统可以用来建造整个建筑,特别是在困难的环境中,如在太空,或在月球或火星上,Gershenfeld说。这将消除从地球运送大型预制结构的需要。相反,它可以发送大量的微小的亚单位——或者使用能够在最终目的地生成这些亚单位的系统从当地材料中生成它们。“如果你能造一架大型喷气式飞机,你就能造一座大楼,”格申菲尔德说。
桑德尔Fekete研究所所长操作系统和计算机网络在布伦瑞克技术大学,在德国,他并没有参与这项研究,他说“超轻、数码等材料[这些]打开神奇的视角构建高效、复杂、大规模的结构,在航空航天应用中至关重要的。”
但是装配这样的系统是一个挑战,Fekete说,他计划加入控制系统进一步发展的研究小组。“在这方面,使用小型和简单的机器人有望带来下一个突破:机器人不会累或无聊,使用许多微型机器人似乎是完成这项关键工作的唯一途径。”本·詹妮特和他的合作者们的这项极具独创性和智慧的工作向可动态调节的飞机机翼、巨大的太阳帆甚至可重新配置的太空栖息地的建造迈出了巨大的一步。”
在这个过程中,Gershenfeld说,“我们感觉我们正在发现一个混合材料机器人系统的新领域。”
新闻旨在传播有益信息,英文原版地址:http://news.mit.edu/2019/robots-large-structures-little-pieces-1016